

Recently, a team led by Associate Professor Wang Hongqiang from the Department of Mechanical and Energy Engineering, School of Engineering at Southern University of Science and Technology (SUSTech), who also serves as a mentor at Shuren College, achieved a significant breakthrough in the fields of humanoid and bionic robotics. The team successfully developed a novel bone-mimetic deformable flexible mechanism based on pneumatic expansion structures and multi-dimensional stabilization mechanisms. This mechanism, weighing only 350 grams, achieves extensibility of up to 315% while possessing excellent load-bearing capability, structural stability, and compliance. Building on this innovative mechanism, the team further developed the first lightweight soft humanoid robot "GrowHR," standing 1.36 meters tall and weighing only 4.5 kilograms—less than 20% of the weight of traditional rigid robots of the same size.
This breakthrough research provides an entirely new technical pathway for addressing challenges in robot safety and environmental adaptability, and is expected to propel robots from industrial scenarios into everyday life, becoming safe and reliable companions for humans like Baymax from science fiction films.
Part 1: Inspiration from Human Skeletal Structure
According to predictions, every household in the future will have a robot helping humans complete various complex tasks, and possibly every person will have a robot companion. However, current robots are still difficult to deploy widely—one reason being their excessive weight and overly rigid structures, which make them prone to colliding with people or the surrounding environment, creating personal injury and property damage risks, while the robots themselves are easily damaged. Moreover, robots themselves struggle to adapt to humanity's diverse and complex environments. While science fiction films like Baymax nicely solved similar problems, how to achieve this in real life has been a problem scientists have been desperately seeking solutions to for decades.
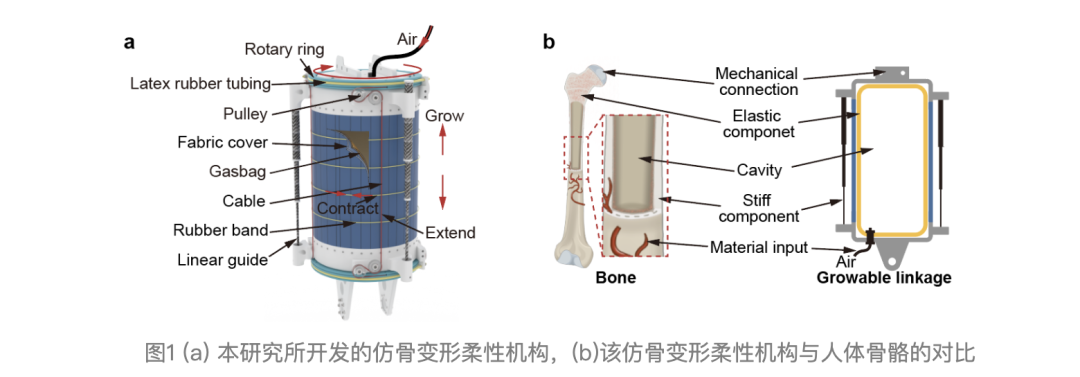
Professor Wang Hongqiang's team drew inspiration from the "combining rigidity with flexibility" characteristics of the human skeletal system, proposing and realizing a bone-mimetic deformable flexible mechanism (Figure 1). Human bones are both strong and capable of flexible movement through joints, and can even absorb energy through minor deformation when impacted. Through the synergistic design of pneumatic expansion structures and multi-dimensional stabilization mechanisms, simulating the deformation and load-bearing characteristics of bones, the team created a novel mechanism that is both lightweight and robust.
Part 2: Multi-Scenario Robot with Free Deformation
Based on the bone-mimetic deformable flexible mechanism, the team successfully developed a soft humanoid robot named "GrowHR." GrowHR is not only humanoid in appearance, but functionally "superhuman," possessing deformation capabilities and environmental adaptability that traditional humanoid robots can hardly match:
Dynamic Morphological Adaptability: GrowHR can autonomously adjust its body shape according to environmental needs, significantly contracting its volume in narrow or confined spaces. In experimental demonstrations, it can deform to pass through a low opening measuring only 36% of its original height (Figure 2(a)), and squeeze through a gap only 61% of its original width by contracting its torso (Figure 2(b)), significantly enhancing its passability and environmental adaptability in complex terrain.
Multimodal Locomotion Capability: Thanks to the telescopic function of its leg bones, GrowHR can not only walk like traditional humanoid robots, but can also crawl like an insect (Figure 2(c)), entering extremely small cave spaces. Additionally, with an overall density of only 5.8% that of water, it possesses exceptional aquatic performance—capable of carrying objects 16 times its own weight in water, achieving floating and swimming (Figure 2(d)), and even performing light "water walking" with the aid of flippers and counterweights. This greatly expands the application scenarios for humanoid robots, making them suitable not only for factories and homes, but also for tasks such as water rescue and surface cleaning.
Lightweight and Air-Deployable: Due to its light overall mass (4.5 kg), with the assistance of ducted fans or drones, GrowHR can even "take to the skies," enabling long-distance deployment operations over thousands of kilometers (Figure 2(e)).
Part 3: Suitable for Human-Robot Coexistence Environments
Safety is another major breakthrough for GrowHR. Traditional robots, due to their heavy mass and rigid structures, can potentially cause harm to people or the environment in accidental collisions. GrowHR's skeletal structure itself is flexible and lightweight, giving the overall robot significantly enhanced safety. For example, its ground impact force is only 1/1.7 that of a rigid robot of equal weight, and its weight is light enough to be lifted by a 6-year-old child, allowing for safe interaction of all kinds (Figure 3). Therefore, for humans who may live and work alongside it, this robot is intrinsically safe.
"Our goal is not only to create a functionally powerful robot, but more importantly to ensure it can safely live and work alongside humans," a team member stated. "GrowHR's intrinsic safety characteristics make it highly suitable for future close-proximity human-robot interaction scenarios such as homes, healthcare, and education."
Part 4: Future Application Scenarios
This research greatly expands the application possibilities for humanoid robots. Traditional humanoid robots are mostly confined to structured environments, while GrowHR, with its deformation capabilities and multimodal locomotion characteristics, can adapt to diverse scenarios ranging from indoor homes to wilderness rescue, from water surface cleaning to aerial deployment.
Imagine a future where every household might have such a robot assistant—it could help you search for items in tight spaces, navigate obstacles for rescue in emergencies, or even perform water surface search and rescue missions during floods. Its lightweight and safe characteristics allow humans to interact with it with peace of mind.
This research provides an entirely new and effective solution for achieving safer, more functional future humanoid robots and bringing them into our lives. The SUSTech team will continue to dedicate itself to innovative robotics technology, contributing to building a safer, more intelligent, and more integrated future of human-robot coexistence.
This research has been published in the top international journal Science Advances under the title "Bioinspired Growable Humanoid Robot with Bone-Mimetic Linkages for Versatile Mobility." Liu Hao, a doctoral student in the Department of Mechanical and Energy Engineering, is the first author. Yang Yanda, Wang Ting, and Yin Jintao are co-authors, and Professor Wang Hongqiang is the sole corresponding author. SUSTech is the first affiliated institution. This project was supported by the National Natural Science Foundation of China, Guangdong Provincial Natural Science Foundation, and Guangdong Provincial Research Support Program.
Key Technological Breakthroughs
Previous Article
Next Article
Linkerbot Closes Nearly $207 Million Series B RoundAbout the Author
Robotics Insider
Industry analyst with 15+ years of experience covering robotics and automation technologies.
View all articles


